![]()
Examples using Transfer Functions#
Proportional–Integral–Derivative (PID) control#
A PID controller is one of the most widely used feedback control laws. It computes the control input based on the error signal
where \(r(t)\) is the reference input and \(y(t)\) is the system output.
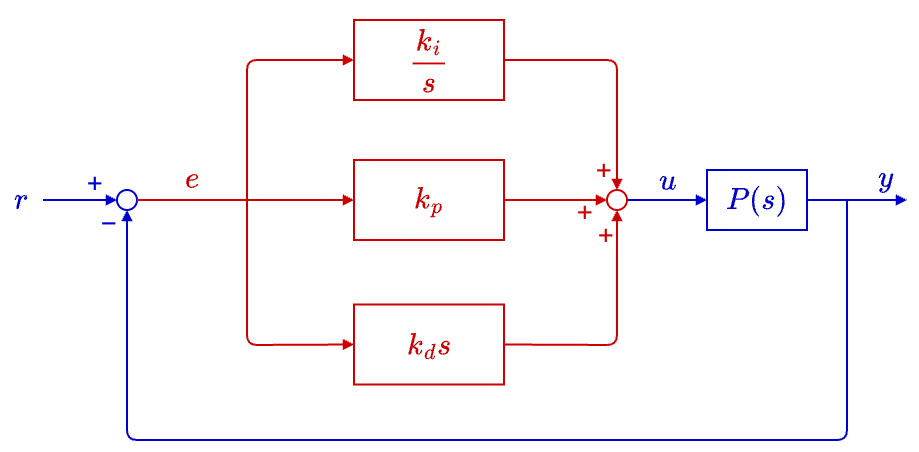
A PID controller generates the control input \(u(t)\) as a combination of three terms:
Each term plays a distinct role:
Proportional (P) \(\left(k_p e(t)\right)\): Reacts to the current error.
Integral (I) \(\left(t_0^t e(\tau)\, d\tau\right)\): Accumulates past error, eliminating steady-state offset.
Derivative (D) \(\left(k_d \frac{de(t)}{dt}\right)\): Anticipates future error by responding to its rate of change.
The transfer function for the controller from \(e\) to \(u\) is
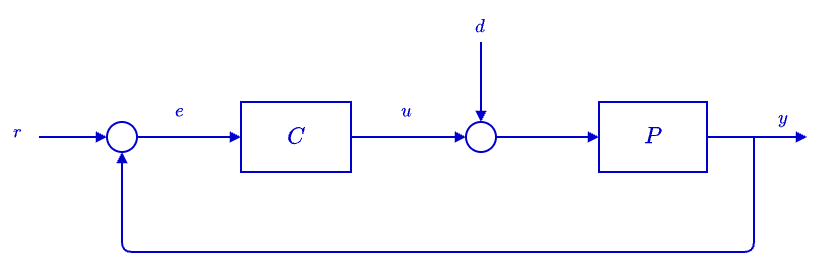
Let the plant to be controlled have the transfer function \(P(s)\) (as shown in the digram above).
Steady-state reference tracking#
We will now analyze the effect of PID controllers on stead-state reference tracking.
The closed-loop transfer function from \(r\) to \(y\) is
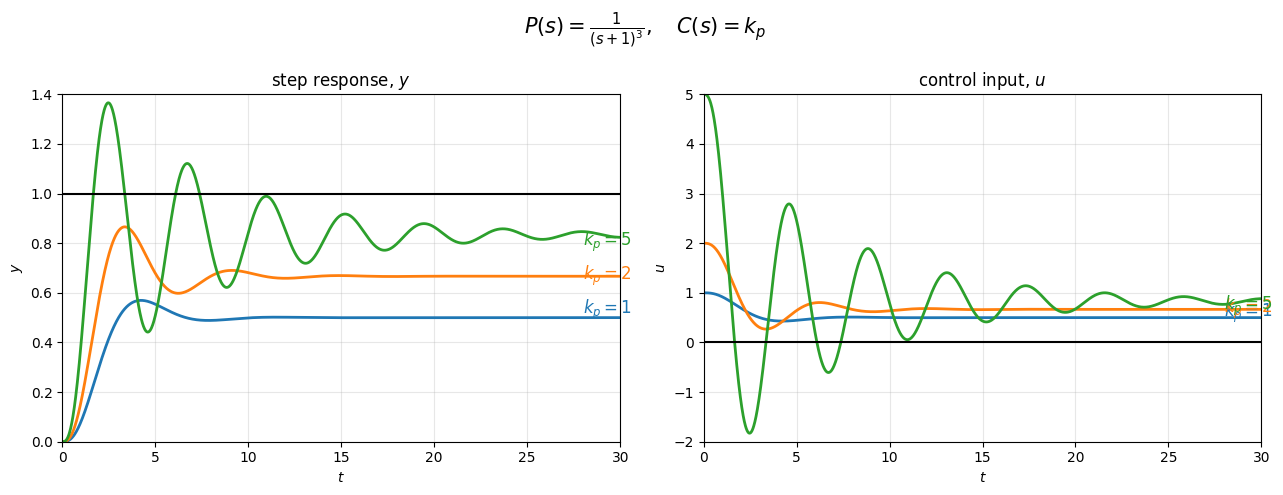
(Only) Proportional control
First, consider pure proportional feedback, i.e., \(k_i = 0\) and \(k_d = 0.\)
For a unit step reference input, the steady-state output is
Since $\( C(s) = k_p \;\;\Rightarrow\;\; C(0) = k_p, \)$
we obtain
Key observations: Proportional control alone cannot eliminate steady-state error, but it can reduce it.
Increasing \(k_p\) makes \(y_{ss}\) closer to 1.
However, \(y_{ss} \neq 1\) for any finite \(k_p\).
From the example below, increasing \(k_p\):
Reduces the steady-state error.
But also introduces (larger) oscillations and increases overshoot.
Steady-state reference tracking (continued)#
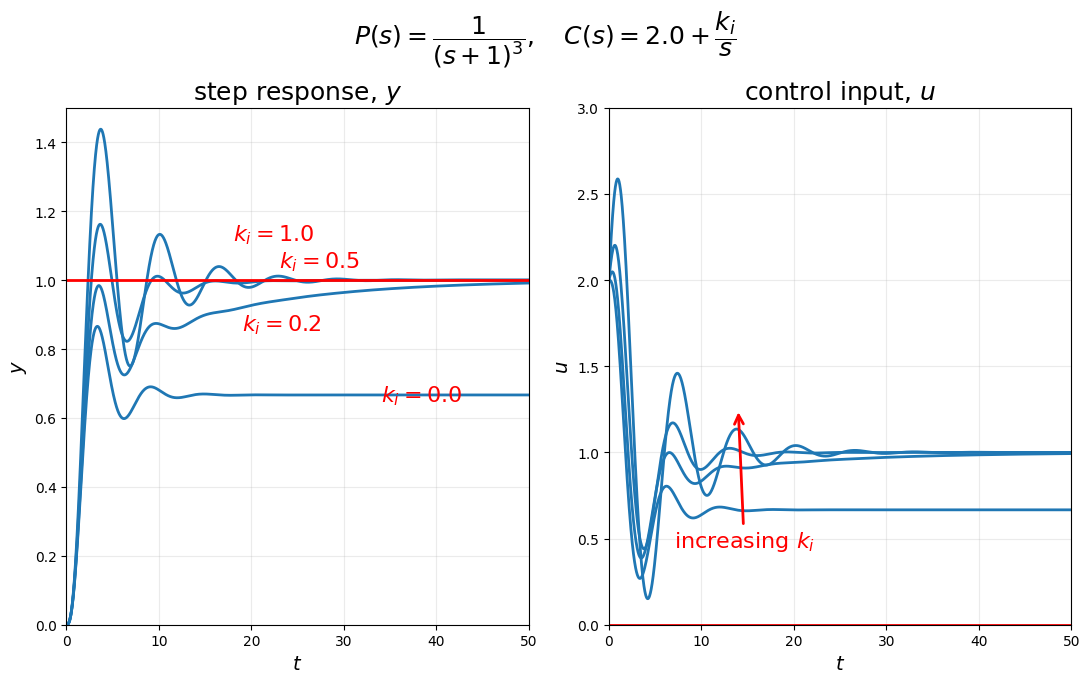
Proportional–Integral (PI) control
Introduce integral feedback: $\( C(s) = k_p + \frac{k_i}{s}. \)$
The closed-loop transfer function from \(r\) to \(y\) is $\( G_{ry}(s) = \frac{\left(k_p + \frac{k_i}{s}\right) P(s)}{1 + \left(k_p + \frac{k_i}{s}\right) P(s)}= \frac{(k_p s + k_i) P(s)}{s + (k_p s + k_i) P(s)}. \)$
For a unit step reference input, $\( G_{ry}(0) = \frac{k_i P(0)}{k_i P(0)} = 1. \)$
Key observations:
Perfect reference tracking (zero steady-state error) is achieved as long as \(k_i \neq 0\) (and the closed-loop system stays stable).
This result is independent of the plant gain \(P(0)\); hence, it is robust to model uncertainty.
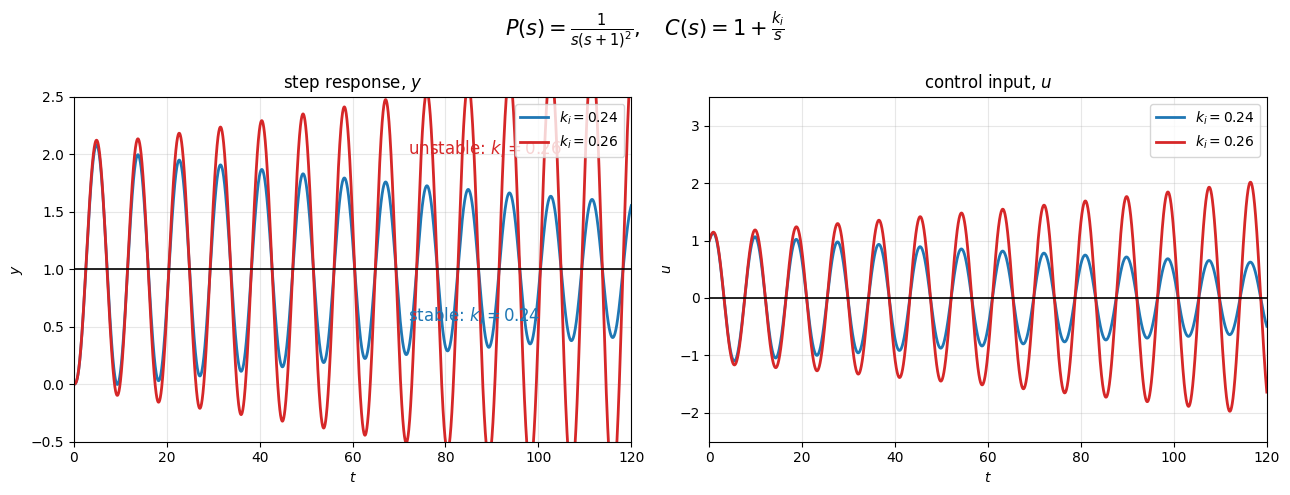
Based on the example below, increasing \(k_i\) increases the speed of the approach to the steady-state output. But, the system becomes more oscillatory, and may cease to be stable.
Steady-state reference tracking (continued)#
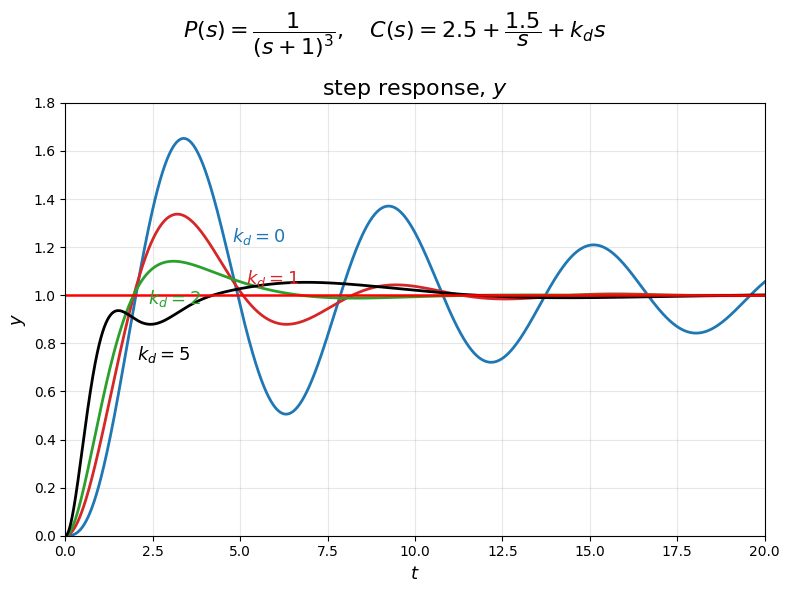
Proportional-integtral-derivative control
Let us now add the derivative term:
From the numerical example (with fixed \(k_p = 2.5\) and \(k_i = 1.5,\) as \(k_d\) increases, the closed-loop system becomes more damped. So, the derivative term increases damping and can improve transient behavior.
Let’s look at an example. Consider a second-order plant
We analyze the closed-loop behavior under derivative control only, with
The closed-loop transfer function is
Thus, the closed-loop characteristic polynomial
Comparing with a standard second-order system
we identify:
In conclusion, \(\alpha_2\) is unchanged; hence, the natural frequency \(\omega_n\) is unchanged. On the other hand, \(\alpha_1\) increases to \(\alpha_1 + k_d\); hence, the damping ratio \(\zeta\) increases.
Another useful role of integral action: disturbance rejection#
Consider the feedback system with an additive disturbance \(d\) entering at the plant input.
We now study integral action for disturbance attenuation, rather than reference tracking.
Assume \(r=0,\) and let \(d\) be a unit step disturbance.
Take a pure integral controller:
The transfer function from \(d\) to \(y\) is
Substituting \(C(s)=\frac{k_i}{s}\) gives
For a stable closed-loop system, the steady-state gain from a step disturbance is \(G_{dy}(0)\). Hence
Therefore, the steady-state output due to a unit step disturbance is zero.
Example: Comparing different PID controllers#
Consider the feedback interconnection
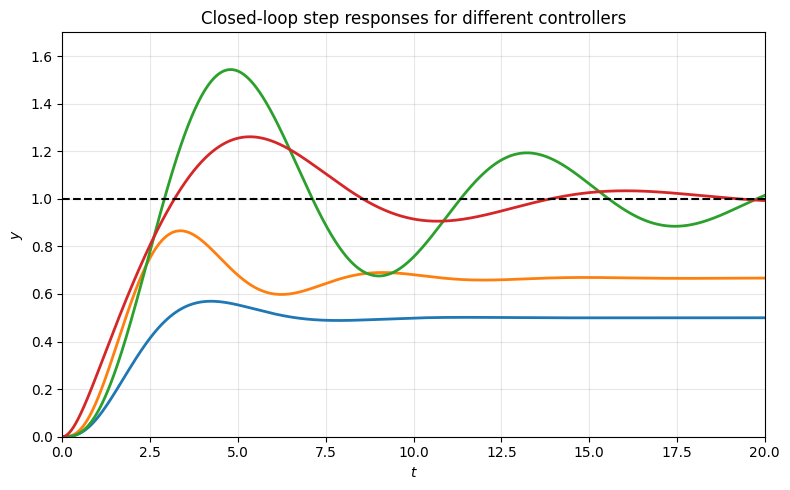
and four differnt controllers: $\( \begin{aligned} C_1(s) &= 1, \\ C_2(s) &= 2, \\ C_3(s) &= 1 + \frac{1}{s}, \\ C_4(s) &= 1 + \frac{1}{s} + s. \end{aligned} \)$
The figure below shows the unit step responses (shown in different colors) from \(r\) to \(y\) for the closed-loop system with these four different controllers. Match \(C_1, \ldots, C_4\) to the shown step responses.
Blue: \(C_1(s)=1\): proportional control with smaller (than \(C_2\)) gain
\(\Rightarrow\) slower response, larger steady-state errorOrange: \(C_2(s)=2\): higher proportional gain
\(\Rightarrow\) faster response, smaller steady-state error, more oscillationGreen: \(C_3(s)=1+\frac{1}{s}\) (PI):
\(\Rightarrow\) zero steady-state error, moderate oscillationsRed: \(C_4(s)=1+\frac{1}{s}+s\) (PID):
\(\Rightarrow\) zero steady-state error with improved damping
Example: Using the steady-state gain to determine an unknown parameter#
Let the transfer function of a stable linear system be $\( G(s)=\frac{5}{s^2+3.2s+a}, \)\( where \)a$ is an unknown parameter.
Suppose the input is a constant step of amplitude \(2\), that is,
and the corresponding steady-state output is
We want to determine the value of \(a\).
For a stable system, the steady-state gain under a step input is
Here,
Since the input magnitude is \(2\) and the steady-state output is \(4\), the gain from input to output is
Therefore,
Set
Hence,
Example: Determining the parameters of a second-order system from steady-state responses#
Consider the stable second-order system
where \(\alpha_1\) and \(\alpha_2\) are unknown.
The corresponding transfer function from \(u\) to \(y\) is
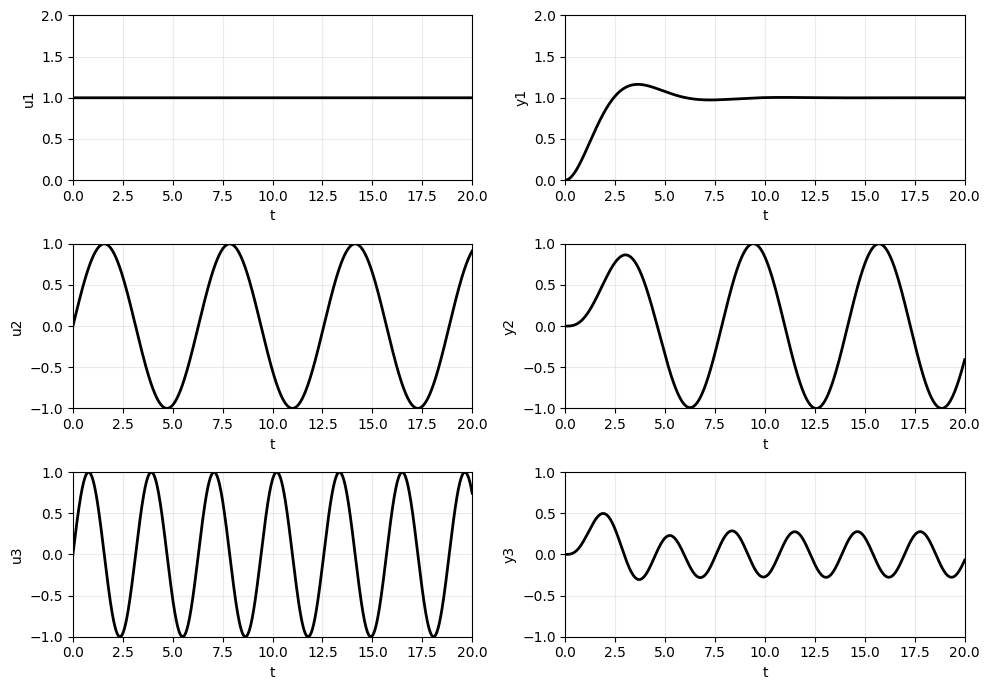
We use the input-output plots (shown below) to determine \(\alpha_1\) and \(\alpha_2\).
For the first input,
From the plot, the steady-state output is
For a stable system, the steady-state gain is
Since the input amplitude is \(1\) and the steady-state output is also \(1\), we get
Hence
Now consider a sinusoidal input with frequency \(\omega=1\).
The frequency response is
At \(\omega=1\), using \(\alpha_2=1\),
Therefore,
From the plot, the steady-state amplitude of \(y_2\) is approximately \(1\), while the input amplitude is also \(1\). Thus
So
Check with the third input (though it is not necessary to determine \(\alpha_1\) and \(\alpha_2\)). For
the predicted steady-state gain is
This is consistent with the smaller amplitude seen in the plot for \(y_3\).
Exercise#
Consider a plant \(P\) with transfer function
(a) Is the plant stable?
(b) Consider a controller, \(C\), with transfer function $\( C(s) = \frac{b}{s + c}. \)$
For the feedback loop consisting of \(P\) and \(C\) (with the usual negative \(( - )\) feedback convention), what is the closed-loop characteristic polynomial?
(c) Pick \(b\) and \(c\) (i.e., parameters of the control law) so that the roots of the closed-loop characteristic equation are $\( -1 \pm j. \)$