![]()
All rights reserved. For enrolled students only. Redistribution prohibited.
Frequency response and transfer functions#
What will we cover?
Steady-state response under exponential and sinusoidal inputs
Transfer functions
Bode plots
Poles and zeros (and eigenvalues)
Block diagram algebra
Response of a linear system under sinusoidal inputs#
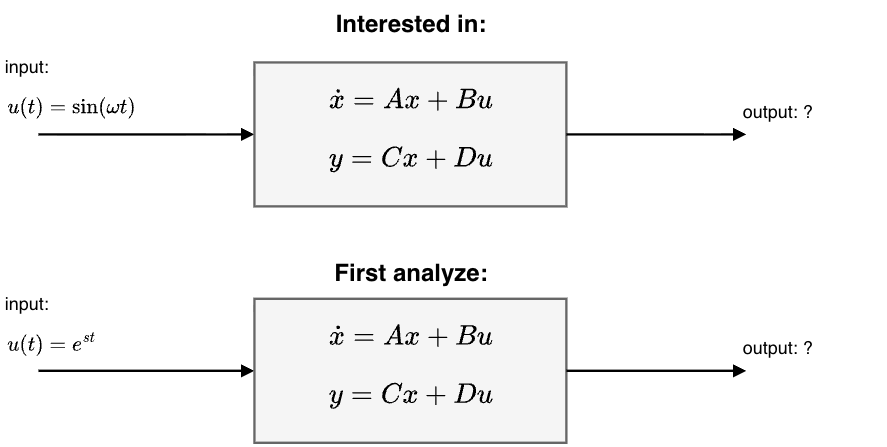
We are now interested in the response (solution) of a linear system
with \(A \in \mathbb{R}^{n \times n}, B \in \mathbb{R}^{n \times 1}, C \in \mathbb{R}^{1 \times n}\) and \(D \in \mathbb{R}\) under sinusoidal inputs, e.g., \(\sin(\omega t)\) or \(\cos(\omega t)\).
Instead we will first analyze the response under inputs of the form of
with \(s \in \mathbb{C}\) and \(\bar{u} \in \mathbb{C}\).
Why care about \(e^{st}\)?#
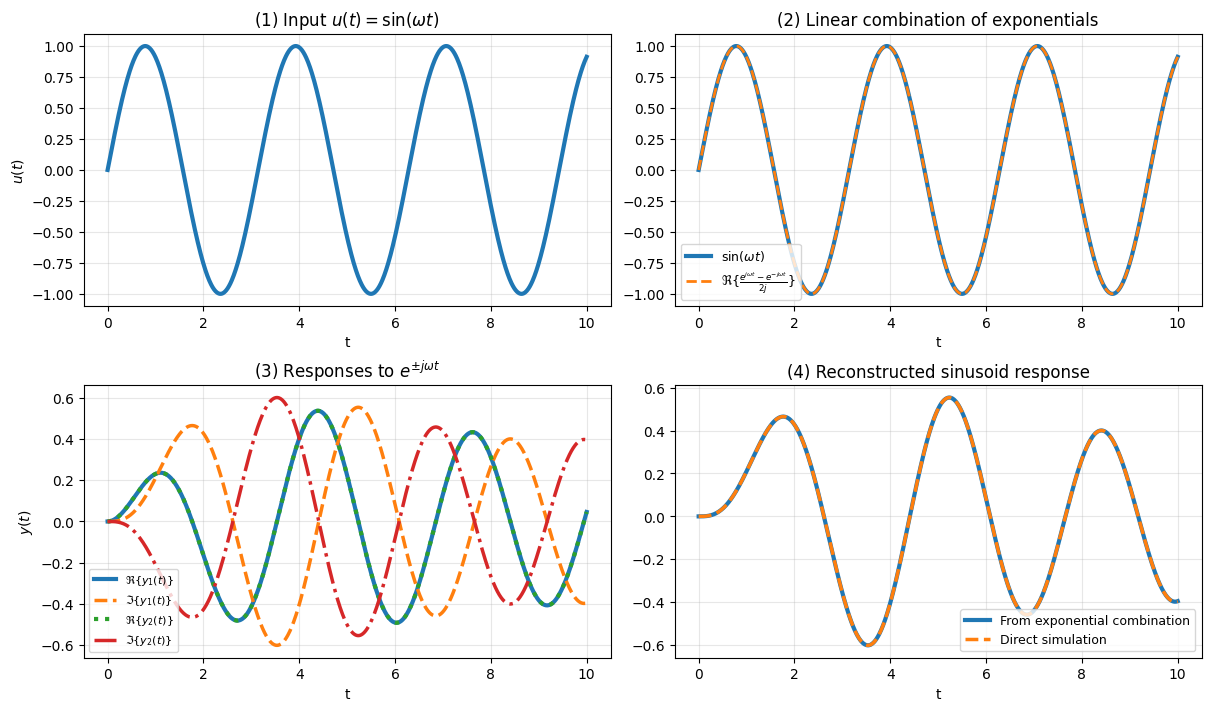
Exponentials generate sinusoids: Using Euler’s identity, \( e^{j\omega t} = \cos(\omega t) + j\sin(\omega t),\)we see that sinusoidal signals can be represented using complex exponentials.
Here is a concrete example.
Thus, a sinusoidal input is a linear combination of complex exponentials with
Because the system is linear, if we know the response to \(e^{s_1 t}\) and \(e^{s_2 t}\), then we automatically know the response to any linear combination:
Thus, by understanding exponential inputs, we can understand a wide range of signals, including:
sinusoids,
damped oscillations,
and combinations of oscillatory modes.
Response to an exponential input#
Assume that all eigenvalues \(\lambda_i\) of \(A\) satisfy
Consider an exponential input of the form
where \(\bar u \in \mathbb{C}\) and \(s \neq \lambda_i(A)\) for all \(i\).
The state solution is
Substituting \(u(\tau) = \bar u e^{s\tau}\) gives
Factor out \(e^{At}\):
Combine exponentials
Thus,
Since \(sI - A\) is invertible (because \(s\) is not an eigenvalue of \(A\)),
Substituting back,
Using \(e^{At} e^{(sI-A)t} = e^{s t},\) we obtain
With \(y(t) = Cx(t) + D u(t)\), we get
Steady-state response under exponential inputs#
Because the system is stable, the term involving \(e^{At}\) decays to zero as time increases.
At steady state, only the forced term remains. Therefore,
For stable linear systems,
where
This function (of s) is call the transfer function for the system.
Observations:
The steady-state output has the same exponential form as the input.
The system acts as a complex gain evaluated at \(s\).
Example: Damped linear oscillator#
Consider the second-order system written in state-space form
with
For \(\zeta>0\), this is a stable damped oscillator.
The transfer function from \(u\) to \(y\) is
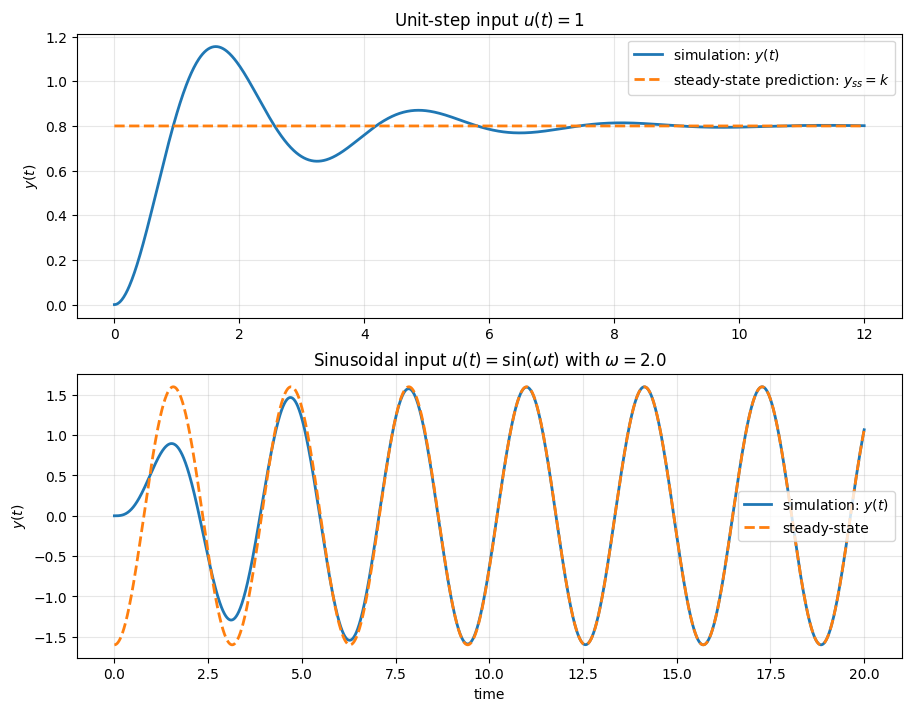
A unit step is the exponential input with \(s=0\) (since \(e^{0t}=1\)), so the steady-state output is
Write
By linearity, the steady-state output is the same linear combination of the corresponding steady-state responses:
Below, we compute both the simulated response and the predicted steady-state response, and plot them together.
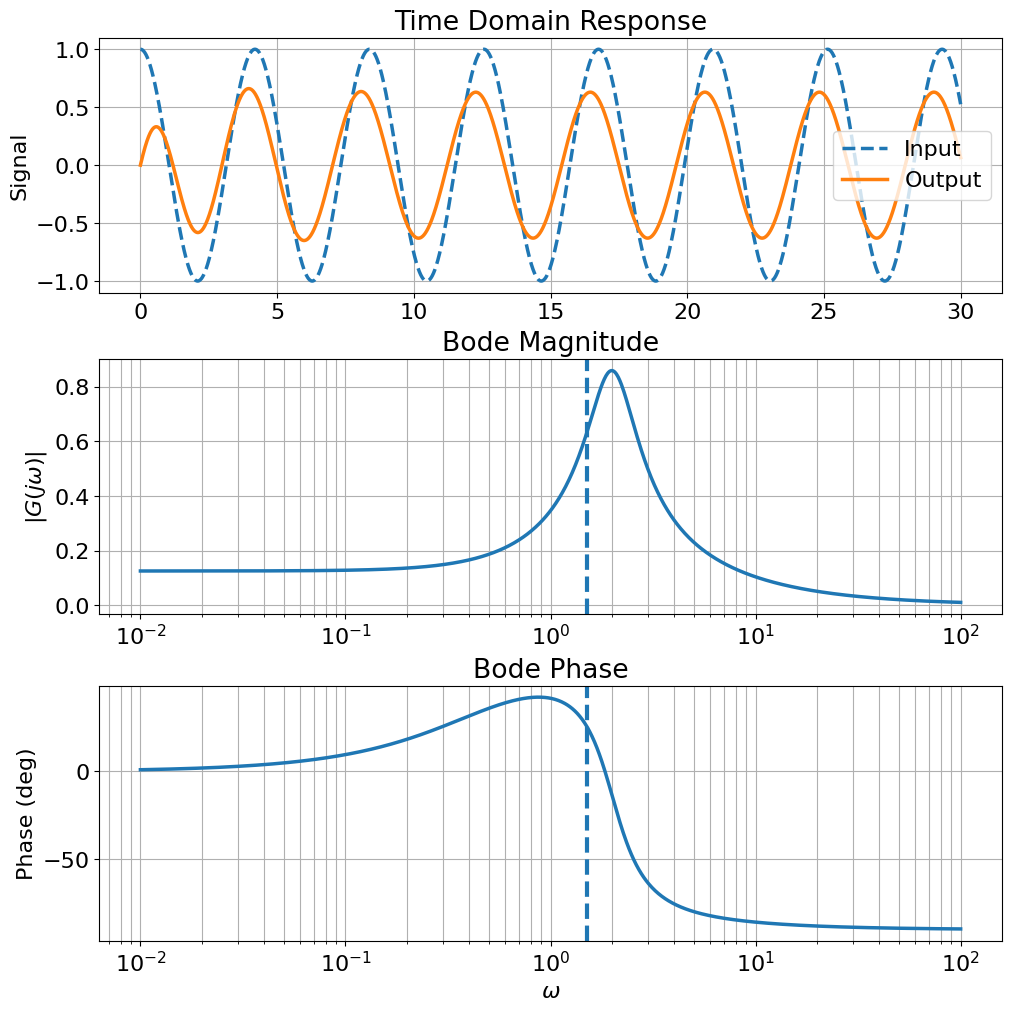
Steady-state response to sinusoidal inputs#
Consider a stable linear time-invariant system with transfer function \(G(s)\). Let the input be
Using Euler’s identity,
we can write
Because the system is linear and stable, the steady-state response to the complex exponential input
is
Taking the real part gives the steady-state output:
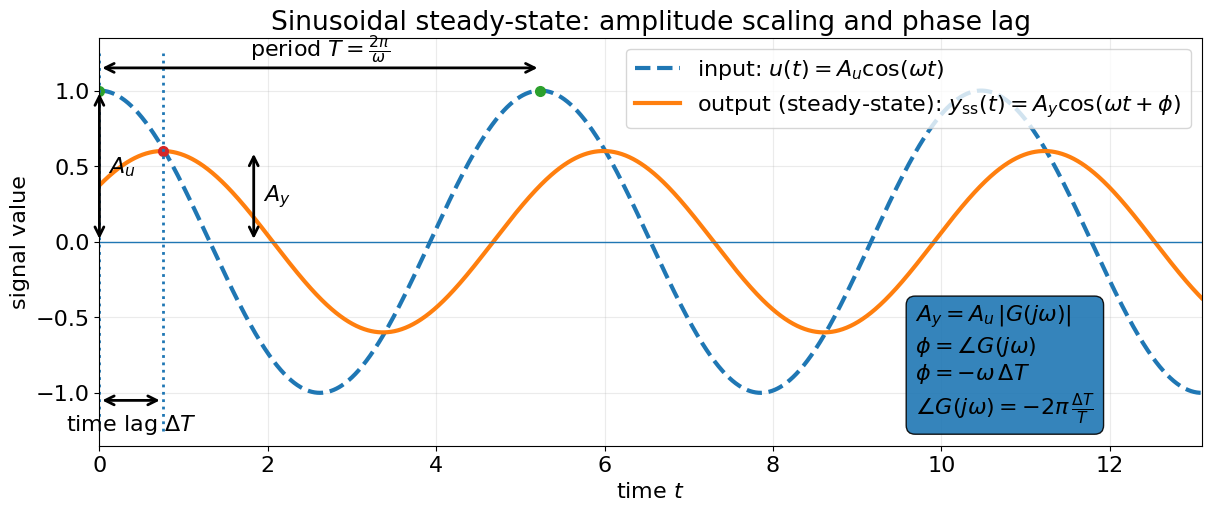
Now write
Then
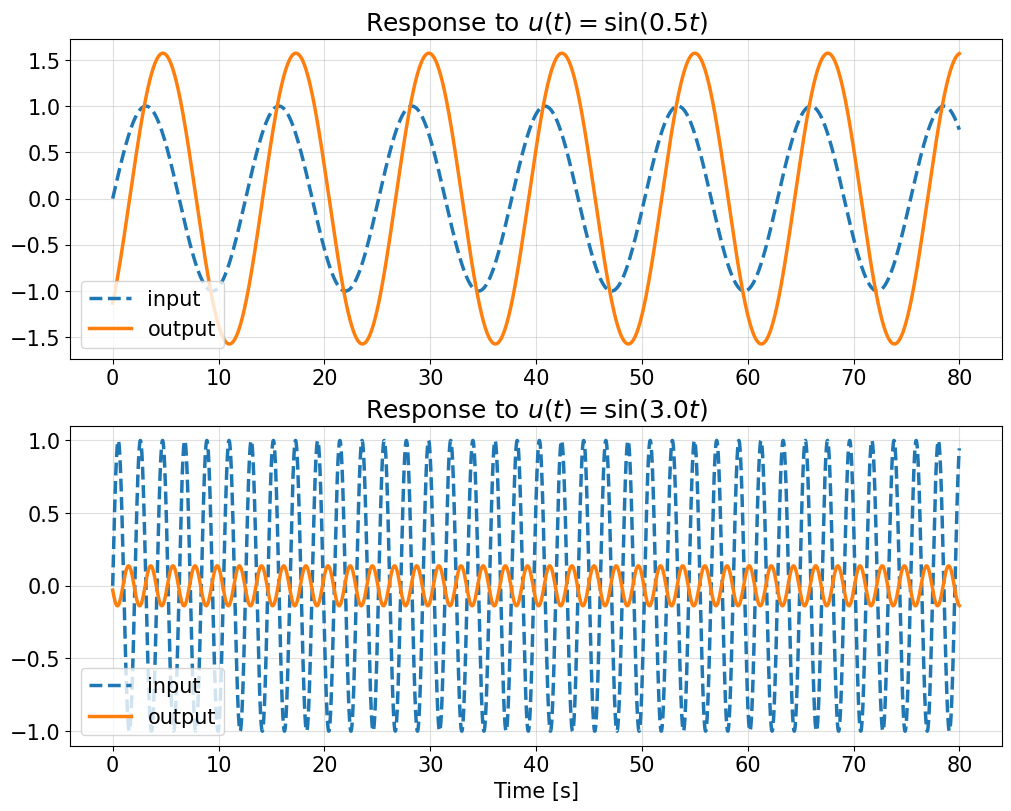
Thus, the output sinusoid has:
the same frequency \(\omega\),
amplitude scaled by \(|G(j\omega)|\),
and phase shift \(\angle G(j\omega)\).
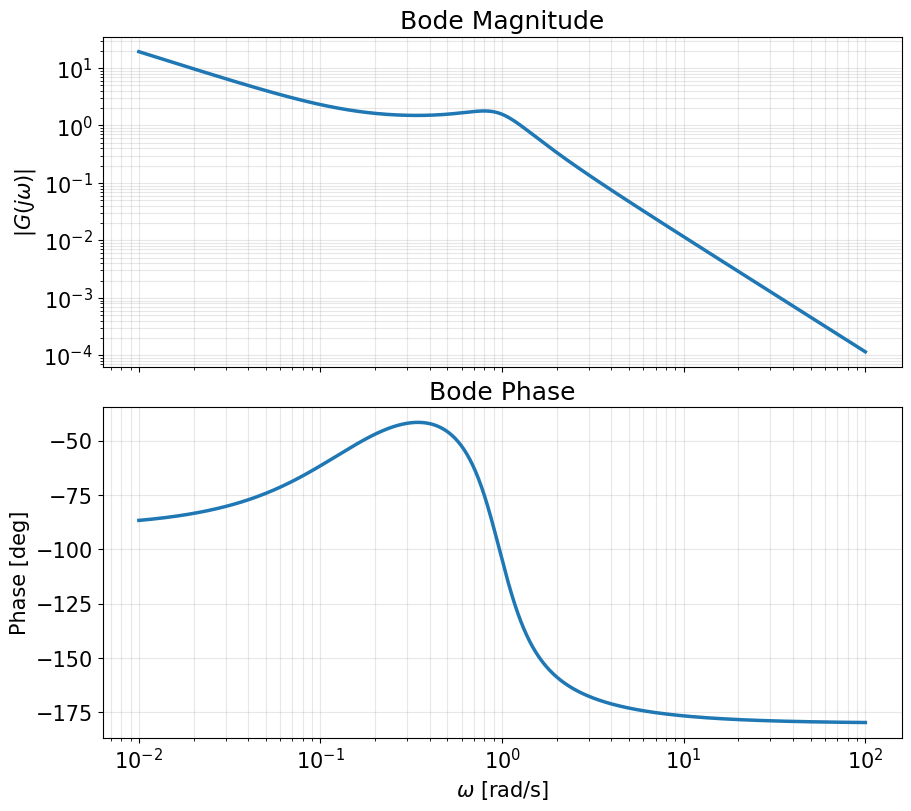
Aircraft Pitch Model#
We now consider the longitudinal pitch dynamics model presented in the University of Michigan Control Tutorials for MATLAB and Simulink (CTMS):
https://ctms.engin.umich.edu/CTMS/?example=AircraftPitch§ion=SystemModeling
The model represents small perturbations about steady cruise flight and describes the pitch motion of an aircraft.
Under standard linearization assumptions (small angles, constant speed, decoupled longitudinal dynamics), the system is written in terms of:
\(\alpha\) : angle of attack
\(q\) : pitch rate
\(\theta\) : pitch angle
The control input is the elevator deflection \(\delta\).
The longitudinal pitch model is
For this model:
The input is the elevator deflection \(\delta\).
The output is the pitch angle \(\theta\).
We may express the linearized system compactly as
with
and
Hence
Compute
Therefore,
Carrying out the matrix multiplication (and using \(D=0\)) yields a third-order transfer function
Shortcuts for obtaining the transfer function#
Consider a linear time-invariant input–output system written in ODE form:
where \(y(t)\) is the output and \(u(t)\) is the input.
Key observations
For linear systems, if the input is an exponential
then at steady state the output must also be of the form
for some scalar \(y_0\) (provided \(s\) is not a root of the characteristic polynomial \(s^n + a_1 s^{n-1} + \cdots + a_n\)).
If \(u(t) = e^{st}\), then
and similarly,
Plugging \(u(t)=e^{st}\) and \(y_{ss}(t)=y_0 e^{st}\) into the differential equation gives
Cancel \(e^{st}\):
Solving for \(y_0\),
Since \(y_{ss}(t) = y_0 e^{st}\) and \(u(t)=e^{st}\), we obtain
The denominator \(a(s)\) is the characteristic polynomial of the ODE (or, in short, of the system).
Examples: ODE ↔ Transfer Function#
In the following examples, substitute \(y_{ss} = y_0 e^{st}\), \(u = e^{st}\) in the given ODEs and isolate \(y_0\) to obtain an expression for the transfer function from \(y\) to \(y\).
Integrator: \( \dot y = u.\)
Derivative: \( y = \dot u.\)
First-order system: \( \dot y + a y = u.\)
Double integrator: \( \ddot y = u.\)
Second-order system: \( \ddot y + 2\zeta\omega_n \dot y + \omega_n^2 y = u.\)
PID controller: \( y = k_p u + k_d \dot u + k_i \int u\,dt.\)
Example: Linearized balance system#
Consider the linearized model of a cart–pendulum (balance) system with the variables
\(p\) = cart position
\(\theta\) = pendulum angle
\(F\) = applied force .
The linearized differential equations are
Here \(M, m, \ell, J, c, \gamma, g\) are physical parameters.
If the input is of the form
then all signals will reach steady-state of the form
Substituting into the ODEs gives
Rearrange:
This can be written compactly as
Let
Expanding gives
The transfer function from force \(F\) to angle \(\theta\)
The transfer function from force \(F\) to position \(p\)
Transfer function from F to theta:
l⋅m⋅s
─────────────────────────────────────────────────────────────────
3 2 2 2 2 3
J⋅M⋅s + J⋅c⋅s - M⋅g⋅l⋅m⋅s + M⋅γ⋅s - c⋅g⋅l⋅m + c⋅γ⋅s - l ⋅m ⋅s
Transfer function from F to p:
2
J⋅s - g⋅l⋅m + γ⋅s
─────────────────────────────────────────────────────────────────────
⎛ 3 2 2 2 2 3⎞
s⋅⎝J⋅M⋅s + J⋅c⋅s - M⋅g⋅l⋅m⋅s + M⋅γ⋅s - c⋅g⋅l⋅m + c⋅γ⋅s - l ⋅m ⋅s ⎠
Common denominator Δ(s):
3 2 2 2 2 3
J⋅M⋅s + J⋅c⋅s - M⋅g⋅l⋅m⋅s + M⋅γ⋅s - c⋅g⋅l⋅m + c⋅γ⋅s - l ⋅m ⋅s
Expanded denominator:
3 2 2 2 2 3
J⋅M⋅s + J⋅c⋅s - M⋅g⋅l⋅m⋅s + M⋅γ⋅s - c⋅g⋅l⋅m + c⋅γ⋅s - l ⋅m ⋅s
--- Direct determinant method ---
G_theta:
<TransferFunction>: sys[30]
Inputs (1): ['u[0]']
Outputs (1): ['y[0]']
0.1 s^2
----------------------------------------------
-0.004 s^4 + 0.0506 s^3 - 0.976 s^2 - 0.0981 s
G_p:
<TransferFunction>: sys[31]
Inputs (1): ['u[0]']
Outputs (1): ['y[0]']
0.006 s^2 + 0.05 s - 0.981
----------------------------------------------
-0.004 s^4 + 0.0506 s^3 - 0.976 s^2 - 0.0981 s
--- State-space method ---
G_theta:
<TransferFunction>: sys[35]
Inputs (1): ['u[0]']
Outputs (1): ['y[0]']
-2.487e-14 s^2 - 25 s
-------------------------------
s^3 - 12.65 s^2 + 244 s + 24.52
G_p:
<TransferFunction>: sys[37]
Inputs (1): ['u[0]']
Outputs (1): ['y[0]']
-1.599e-14 s^3 - 1.5 s^2 - 12.5 s + 245.2
-----------------------------------------
s^4 - 12.65 s^3 + 244 s^2 + 24.52 s
Poles and zeros of a transfer function#
If a transfer function is written as
then
Zeros of \(G\) are the roots of
\[ b(s) = 0, \]Poles of \(G\) are the roots of
\[ a(s) = 0. \]
Example
Consider the transfer function
The zeros are the roots of the numerator
The poles are the roots of the denominator
i.e.,
Example
Consider the transfer function
The zeros are the roots of the numerator
The poles are the roots of the denominator
Factor:
so
Notice that the factor \((s+2)\) appears in both the numerator and denominator. This means there is a “pole–zero cancellation” at \(s = -2\).
After cancellation, the transfer function becomes
Poles and Eigenvalues#
Consider a state-space model
with transfer function
Using the identity
we can write
Therefore, the denominator of \(G(s)\) is given by
By definition, the eigenvalues of \(A\) are the roots of
Hence,
In general, this statement holds up to possible cancellations between the numerator and denominator. When no such cancellations occur, the poles of the transfer function exactly match the eigenvalues of \(A\).
Interpretation
The matrix \(A\) determines the internal dynamics of the system.
The eigenvalues of \(A\) determine how the state evolves.
These same values appear as the poles of the transfer function, which determine the input–output behavior.
Thus, poles provide a direct link between state-space dynamics and transfer-function representations.
Example
Consider the state-space system
The eigenvalues of \(A\) are
Compute
We have
Thus
Multiplying by \(C\),
Combine into a single fraction:
Recap:
Eigenvalues of \(A\): \(-1\), \(-2\)
Poles of \(G(s)\): \(-1\), \(-2\)
Example
Consider the state-space system
The matrix \(A\) has the eigenvalues \(-1\) and \(-2\).
Transfer function (after a pole-zero cancellation) is
which has only one pole at \(s=-1\).
Steady-state gain for step inputs using the transfer function#
Consider a linear input–output system written in ODE form:
The corresponding transfer function is
Now suppose the input is a constant (step) input
If the system is stable, then the output converges to a constant steady-state value
At steady state, all derivatives of \(y(t)\) are zero, and all derivatives of \(u(t)\) of order \(1\) or higher are also zero. Substituting into the ODE gives
Therefore,
This ratio is the steady-state gain from a step input to the output.
Evaluating the transfer function at \(s=0\) gives
Therefore, for a stable system, the steady-state gain from a constant input to the output is
If the same system is written in state-space form
then
Evaluating at \(s=0\) gives
Thus, for a stable system, the steady-state gain from a step input to the output is
Block diagram algebra#
Transfer functions combine in simple ways under standard block-diagram interconnections.
We will consider three different basic interconnections.
Serial interconnection
Suppose two systems are connected in series:

If the input is \(u(t)=e^{st}\), then the output of the first block is
and the output of the second block is
Therefore, the overall transfer function from \(u\) to \(y\) is
Parallel interconnection
Suppose the same input \(u\) is applied to two systems in parallel, and the outputs are added:
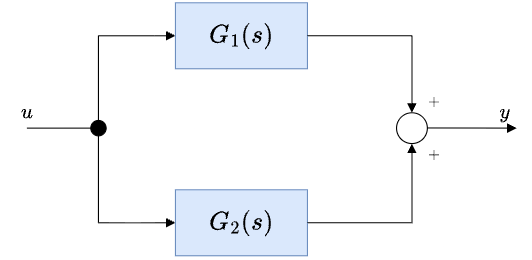
If \(u(t)=e^{st}\), then
Hence,
Therefore, the overall transfer function is
Feedback interconnection
Consider the feedback interconnection
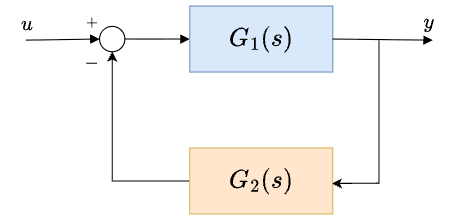
Substituting the error signal into the forward path gives
Rearranging,
so
Therefore, the closed-loop transfer function from \(u\) to \(y\) is
Example (of block diagram algebra)#
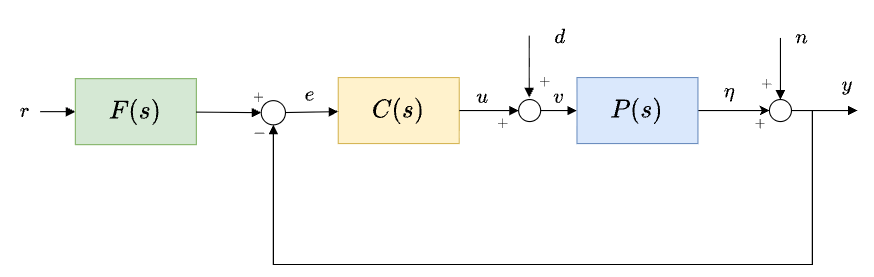
We proceed by following the signals in the block diagram step by step.
From the first summing junction,
From the diagram:
Controller:
Disturbance enters before the plant:
Plant output (before measurement noise):
Measurement noise:
Start from
Substitute \(v = u + d\):
Now substitute \(u = C e\):
Recall
Substitute \(y\):
Expand:
Group terms:
Divide through:
The error is composed of three contributions:
where
Important observation:
The term \(\frac{1}{1+PC}\) appears in all closed-loop transfer functions.
Example#
For the system shown, compute the transfer functions
from \(u\) to \(y\),
from \(u\) to \(w\).
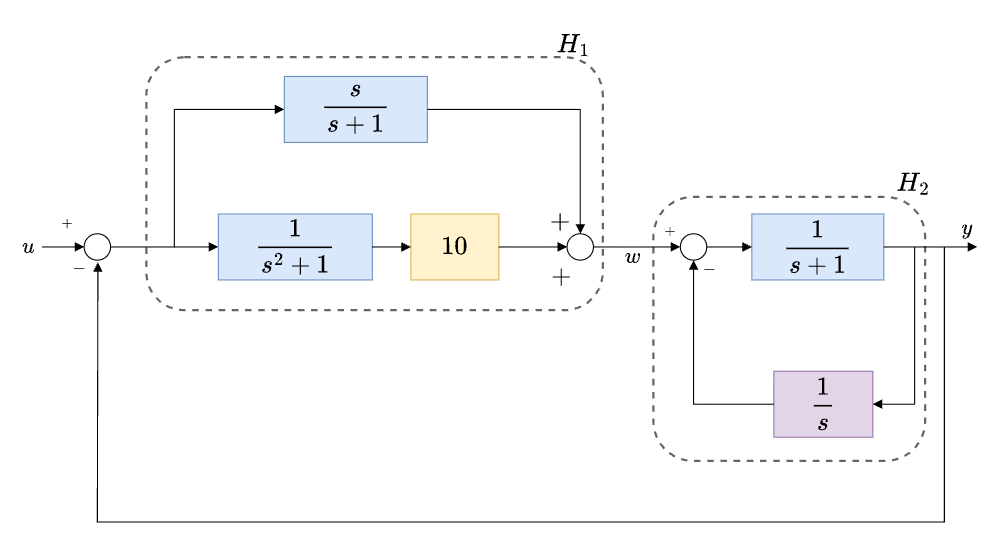
We will use the intermediate subsystems \(H_1\) and \(H_2\) to simplify the derivation.
Compute \(H_1\)
The subsystem \(H_1\) has two parallel branches from its input to the signal \(w\):
upper branch:
lower branch:
Since these two branches are in parallel,
This can be written over a common denominator as
Compute \(H_2\)
The subsystem \(H_2\) is a negative-feedback interconnection with
forward path:
feedback path:
Therefore,
Simplifying,
Outer feedback loop
Once \(H_1\) and \(H_2\) are computed, the overall diagram can be simplified to the following feedback interconnection.
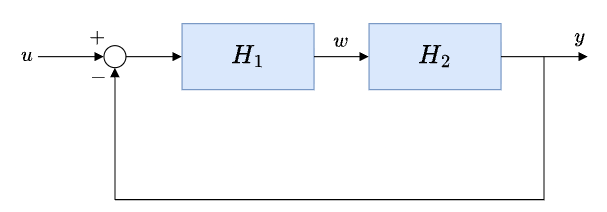
The transfer function from \(u\) to \(y\) is then
Similarly, the transfer function from \(u\) to \(w\) is