![]()
Nyquist plot and criteria plus Margins#
What are we going to cover?#
Graphical representations of transfer functions
Bode and Nyquist plots
Nyquist stability criterion
Robustness margins
##Graphical representations of transfer functions
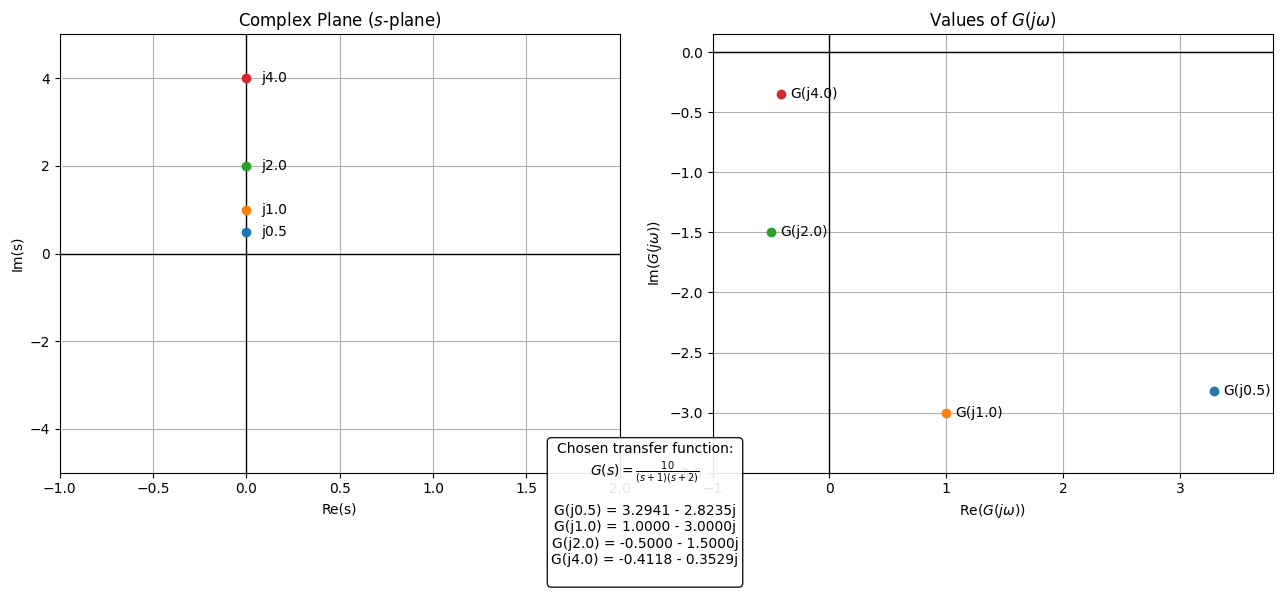
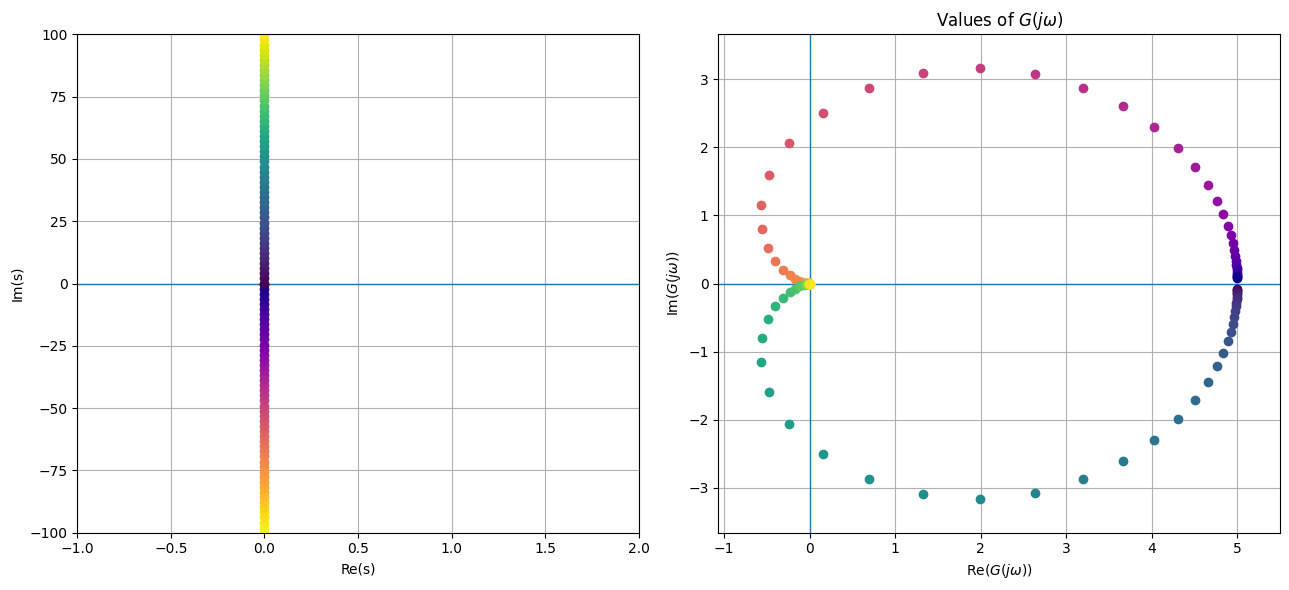
A transfer function \(G(s)\) maps a complex variable \(s \in \mathbb{C}\) to a complex value:
That is, for every input \(s\), the output \(G(s)\) is itself a complex number. Or, a transfer function is a mapping from one complex plane (the (s)-plane) to another complex plane (the (G)-plane).
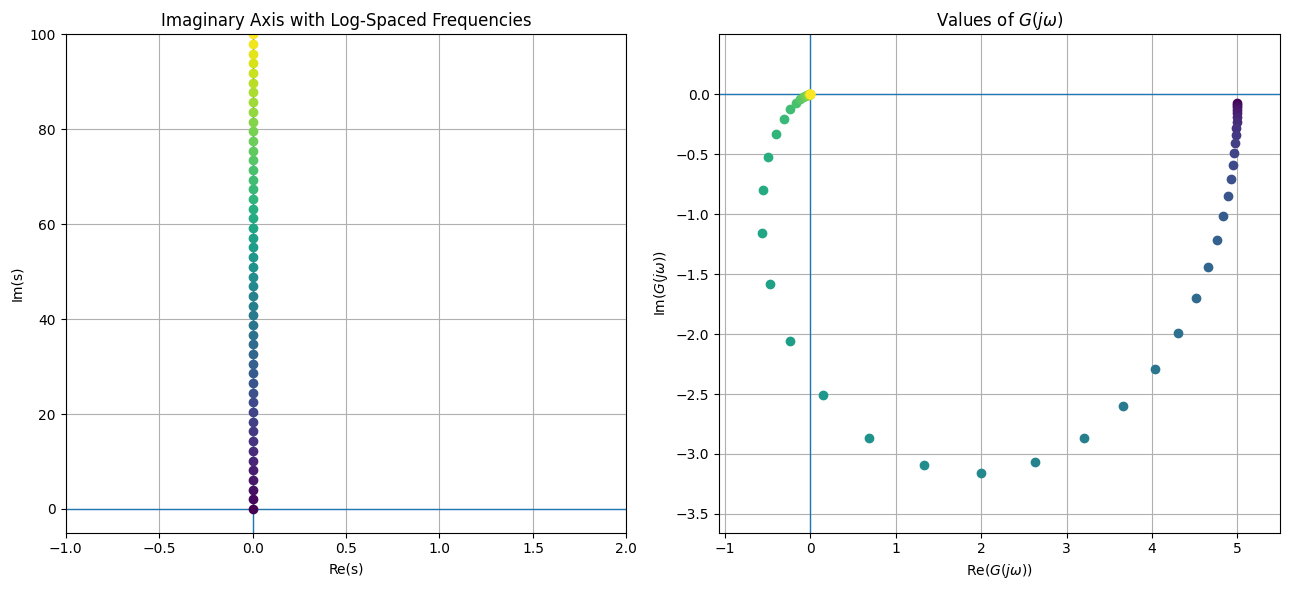
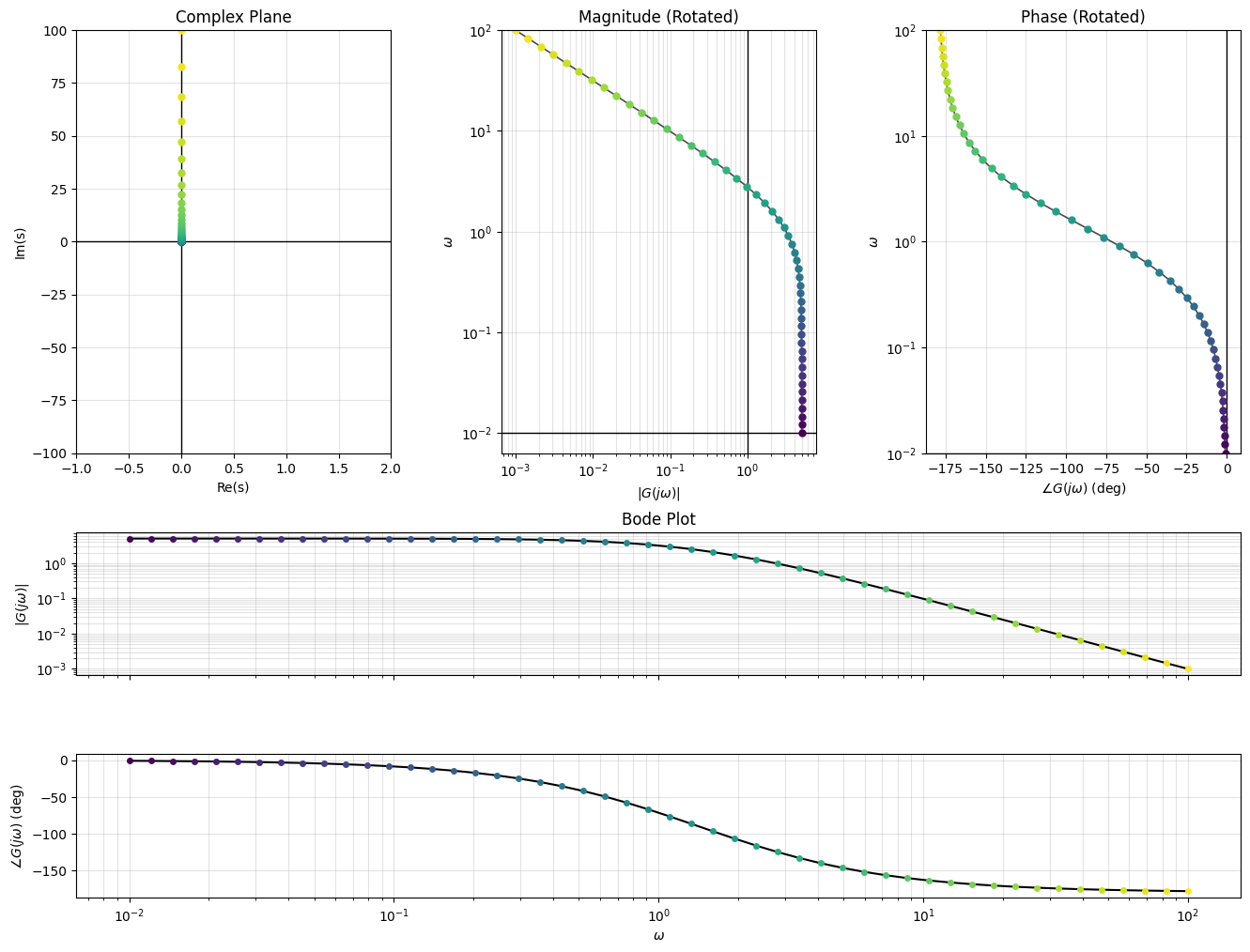
We will explore different graphical ways of visualizing this mapping. Initially, we will focus on what happens when \(s\) is restricted to the imaginary axis,
Loop transfer function and closed-loop stability#
So far, we have focused on understanding how a transfer function \(G(s)\) maps complex inputs \(s\) to complex outputs \(G(s)\), and how this mapping can be visualized in different ways. However, in most applications, we are not interested in a system in isolation. Instead, systems are typically used in feedback configurations, where the output is fed back and compared to a reference. Consider a standard feedback system with plant \(P(s)\) and controller \(C(s)\).
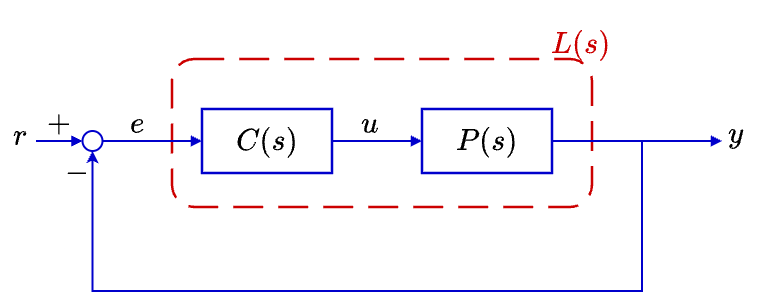
The closed-loop transfer function from \(r\) to \(y\) in the above configuration is
Define the loop transfer function
Then
Closed-loop poles are determined by
Equivalently,
The condition \(L(s) = -1\) is critical for closed-loop stability.
Instead of analyzing \(T(s)\) directly, we can study \(L(s)\): When does \(L(s)\) reach the point \(-1\) in the complex plane?
Take a closer look at the loop transfer function:
at \(K = 2\) and \(s = j\),
When \(L = -1\) (i.e., for \(K = 2\) and \(\omega = 1\)), the closed-loop system becomes marginally stable.
Nyquist plots#
The graphical representations of L(s) are powerful for analyzing the closed-loop stability (and other critical features). As will see, closed-loop stability is determined by how the curve \(L(j\omega)\) is positioned relative to the point \(-1\) in the complex plane.
To fully exploit this idea, we will extend our view beyond just the positive imaginary axis and consider a contour in the complex plane. This leads to the Nyquist plot, which provides a graphical tool for assessing closed-loop stability directly from the loop transfer function.
Nyquist plots build on so-called Nyquist contours. The Nyquist plot of a transfer function \(L\) is obtained by mapping a closed contour in the complex \(s\)-plane through the function \(L(s)\).
What is a Nyquist contour?
A Nyquist contour is a closed path in the complex plane that:
encloses the right half-plane,
is traversed clockwise,
avoids poles of \(L(s)\) that lie on the imaginary axis.
The contour consists of three parts:
The imaginary axis segment
The indentations around imaginary-axis poles
If \(L(s)\) has poles on the imaginary axis, we detour around them using small semicircles in the right half-plane.
These have radius \(r\), and we take \(r \to 0.\)
A large semicircle at infinity
A semicircle of radius \(R\) in the right half-plane: \(|s| = R, \quad R \to \infty.\)
Each point \(s\) on the contour is mapped through:
This produces a curve in the complex \(L\)-plane called the Nyquist plot.
If \(L(s)\) has real coefficients, then:
So the Nyquist plot is symmetric about the real axis.
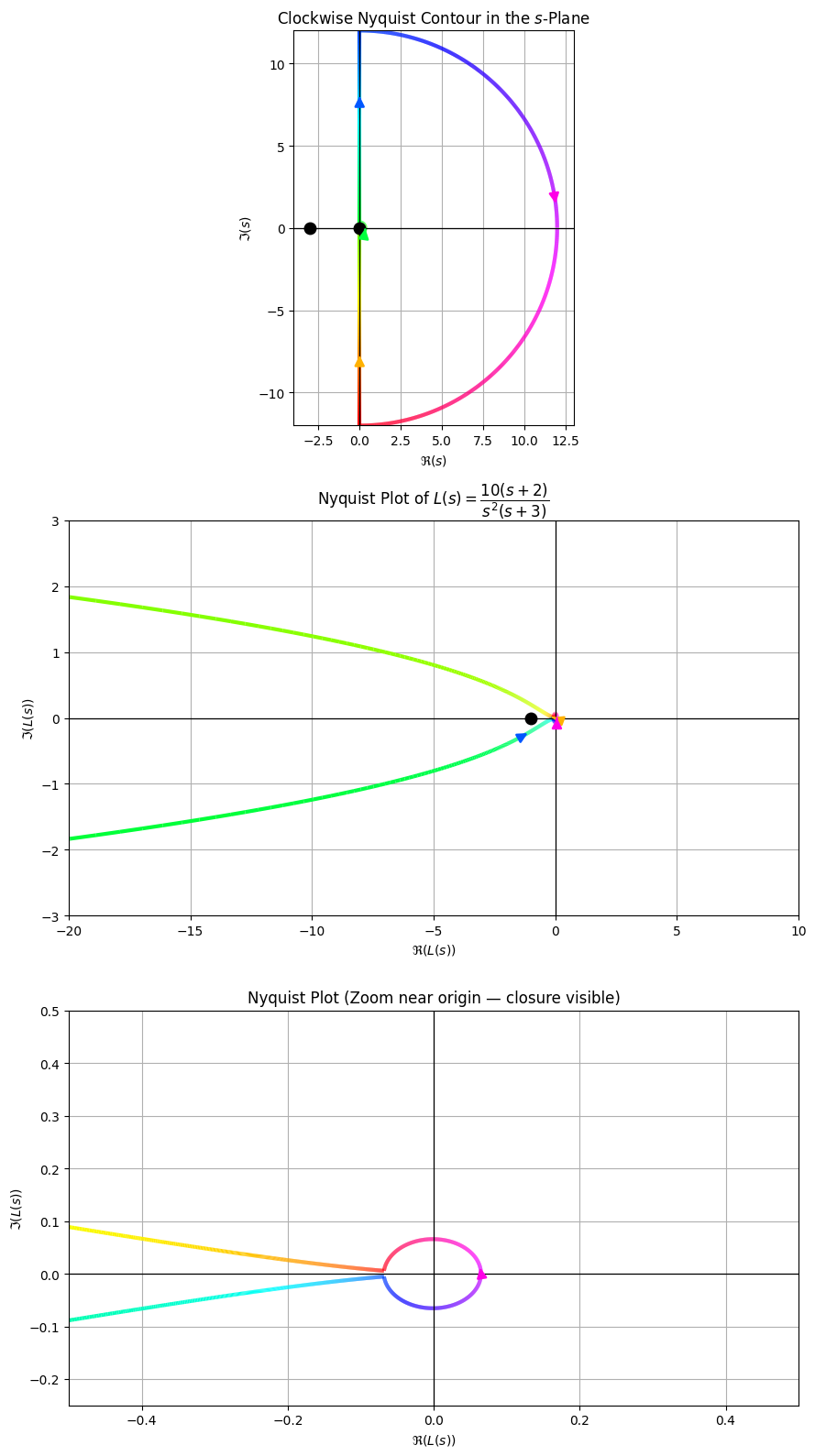
Walk through the derivation of the key aspects on an example#
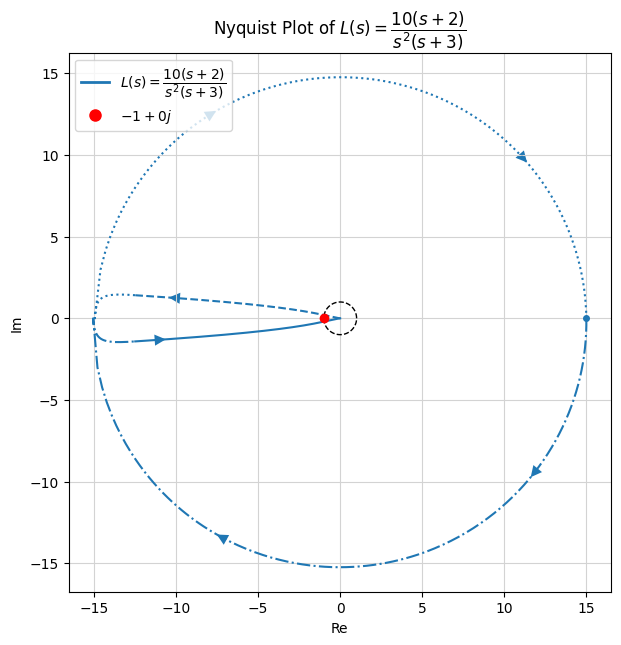
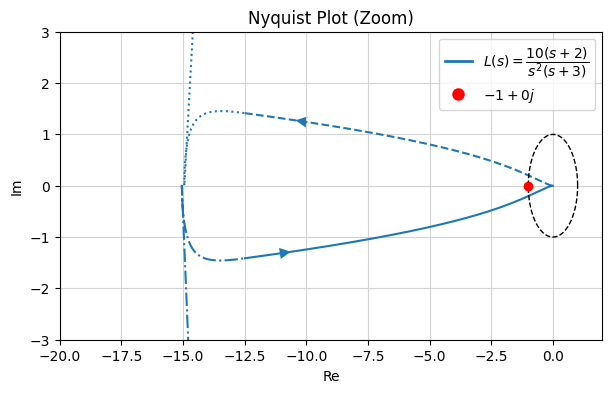
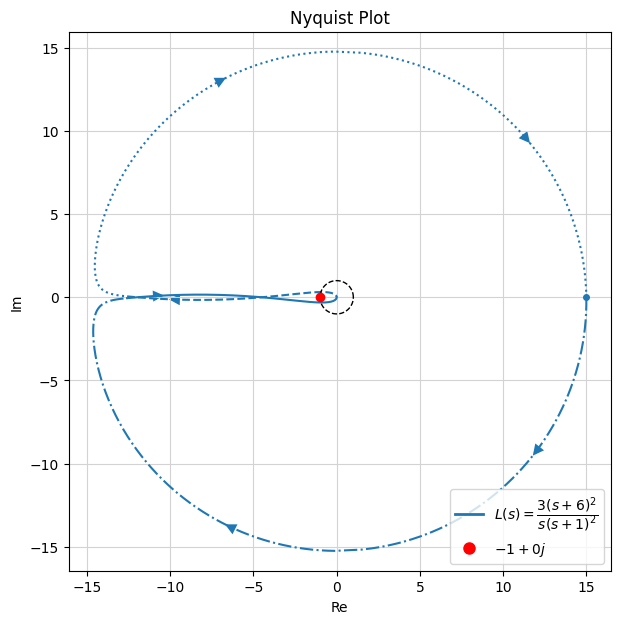
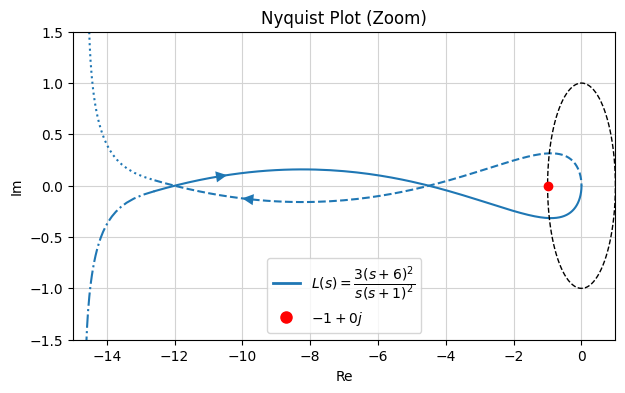
The loop transfer function is
with a zero as \(s = -2\) and three poles at \(s = 0\) (double pole) and \(s = -3.\)
The Nyquist contour is shown in the figure above: It follows the imaginary axis, detours around the origin into the right half-plane, and includes the large semicircle at infinity. It is traversed clockwise.
Behavior at infinity: As \(|s| \to \infty\),
Hence, magnitude \(\to 0\) and phase \(\to -2\angle s\).
The large semicircle in the \(s\)-plane maps to a small curve near the origin in the Nyquist plot.
Behavior near the origin: Near \(s = 0\),
Let
Then
Therefore, magnitude \(\to \infty\) and the angle rotates at twice the rate and in the opposite direction. The small detour around the origin maps to a large arc far away in the Nyquist plot.
Behavior along the imaginary axis: Set \(s = j\omega\):
This determines the main branches of the Nyquist plot.
Symmetry: Since the system has real coefficients, the Nyquist plot is symmetric about the real axis.
Nyquist stability criterion#
\(M_{ol}\): number of poles of the loop transfer function \(L(s)\) in the region enclosed by the Nyquist contour (i.e., poles of \(L(s)\) in the right half-plane)
\(N\): number of clockwise encirclements of the point \(-1\) by the Nyquist plot
\(M_{cl}\): number of closed-loop poles in the right half-plane
Stability criterion: The closed-loop system is stable if and only if
Equivalently,
Special case: If \(L(s)\) has no right-half-plane poles (\(M_{ol} = 0\)), then the system is stable if and only if \( N = 0,\) i.e., the Nyquist plot does not encircle \(-1\).
Example: Nyquist stability for an inverted pendulum#
Consider the loop transfer function (which is obtained using a simple model for an inverted pendulum and a derivative control)
For the analysis, we set \(k = 1.\)
The poles of \(L(s)\) are
and there is one pole in the right half-plane, namely at \(s=1\). Therefore,
With clockwise encirclements taken as positive,
Consequently,
The closed-loop system has no right-half-plane poles, and is therefore stable.
Closed-loop poles:
(-0.5000000000000001+0.8660254037844385j)
(-0.5000000000000001-0.8660254037844385j)
/usr/local/lib/python3.12/dist-packages/control/freqplot.py:1509: UserWarning: number of encirclements was a non-integer value; this can happen is contour is not closed, possibly based on a frequency range that does not include zero.
warnings.warn(
Example 2: Nyquist stability#
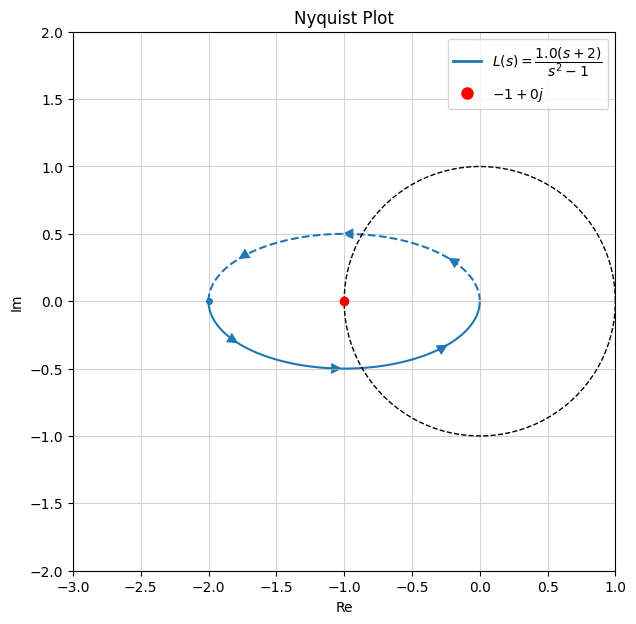
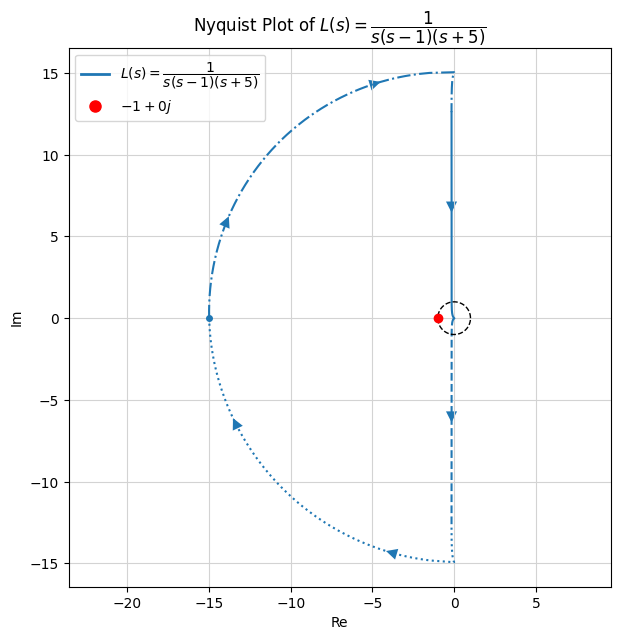
Consider the loop transfer function
Since \(L(s)\) has a right-half-plane pole at \(s=1,\) and
From the Nyquist plot, we observe one clockwise encirclement*of the point \(-1\). Therefore, \(N=1.\)
By the Nyquist criterion,
So, the closed-loop system has two right-half-plane poles and is therefore unstable.
Example 3: Nyquist stability#
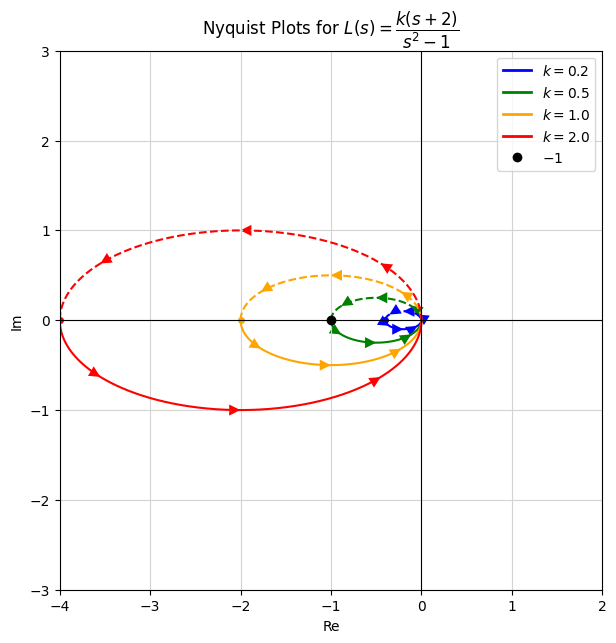
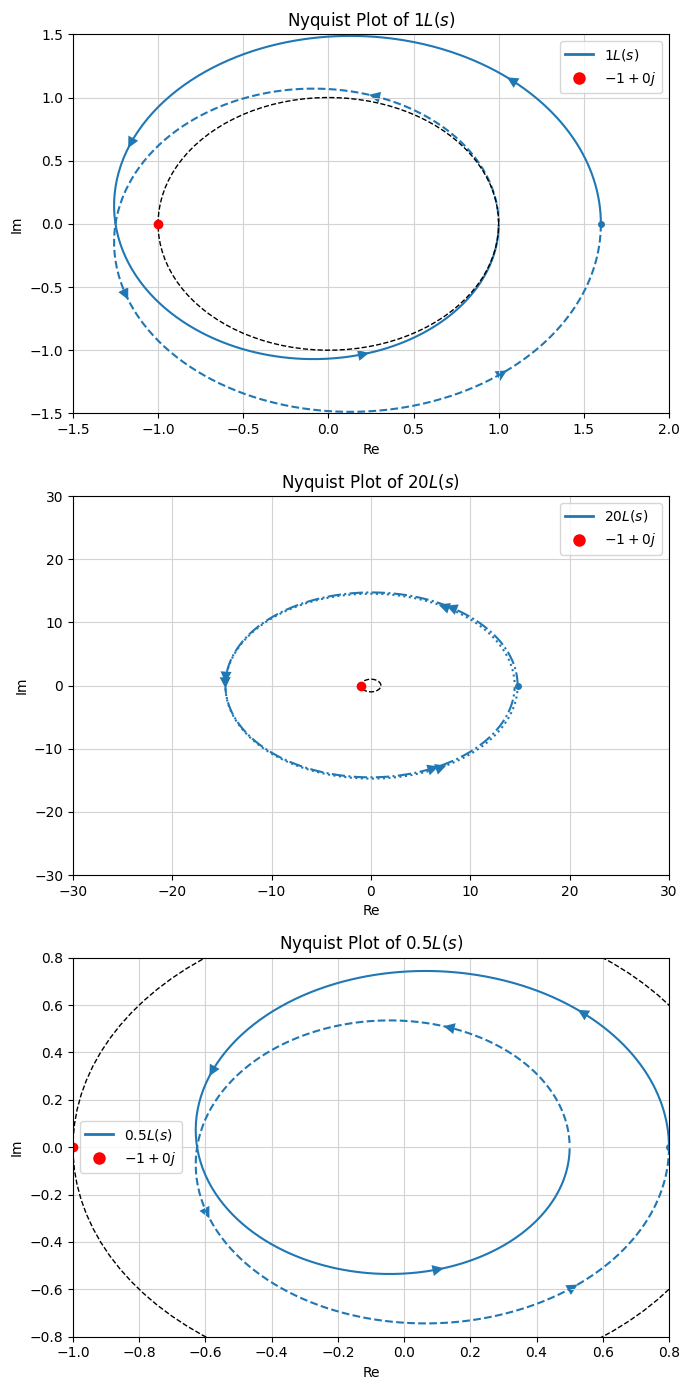
Consider the loop transfer function
The poles of \(L(s)\) are
Both poles lie in the right half-plane. Therefore,
Now consider the Nyquist plot of \(kL(s)\).
For \(k=1\), the plot makes two counterclockwise encirclements of \(-1\): \(N=-2.\) Hence, $\( M_{cl}=M_{ol}+N=2-2=0, \)$ and the closed-loop system is stable.
For \(k=20\), the plot still makes two counterclockwise encirclements of \(-1\): \( N=-2\). Therefore, M_{cl}=2-2=0$ and the closed-loop system is again stable.
For \(k=0.5\), the plot does not encircle \(-1\): \(N=0.\) Therefore, $\( M_{cl}=2+0=2, \)$ and the closed-loop system is unstable.
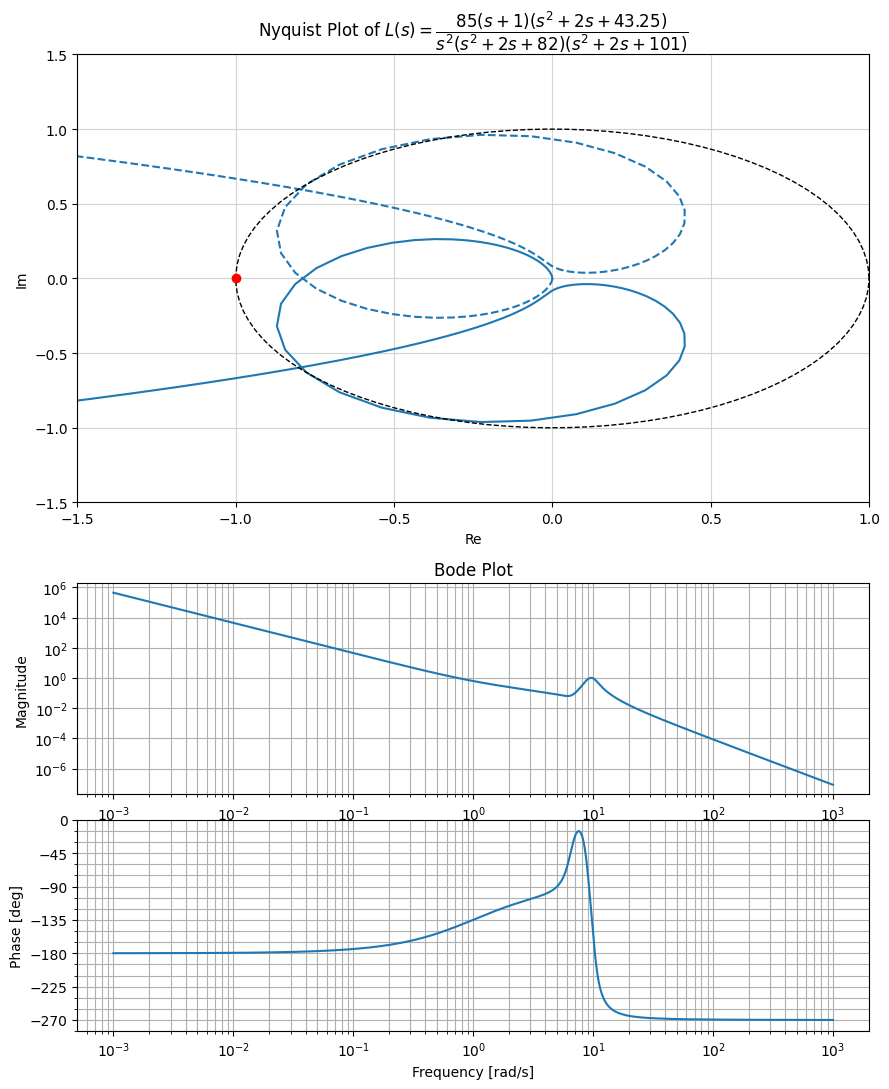
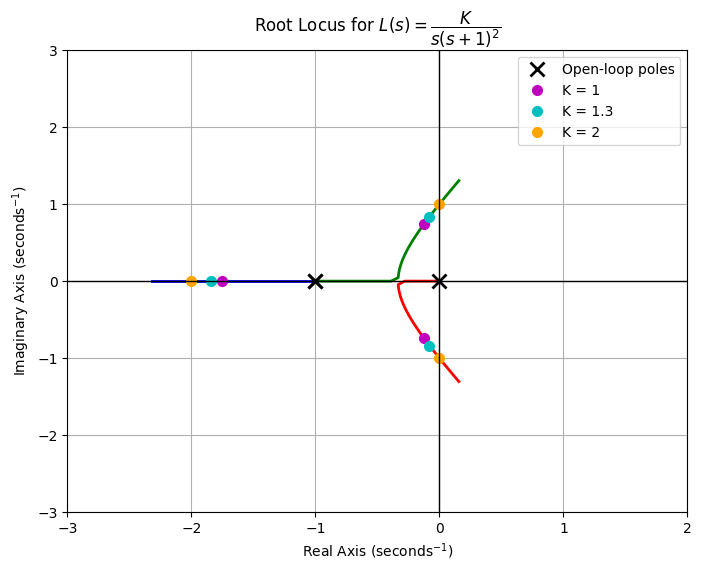
Example: Effect of gain on closed-loop stability using the Nyquist criterion#
Consider the loop transfer function
Let
The open-loop poles are at
Hence, there are no right-half-plane poles and
To determine where stability changes, we find where the Nyquist plot crosses the real axis.
For \(s=j\omega\),
The imaginary part is zero when
Evaluating the real part gives
Therefore, the real-axis crossings of \(L(s)=kL_0(s)\) occur at
The Nyquist plot passes through \(-1\) when
or
Thus the gain has two critical values.
Since \(M_{ol}=0\), the Nyquist criterion gives
The stability of the closed-loop system varies for different ranges of \(k\):
For $\( 0<k<\frac1{12}, \)\( the Nyquist plot does **not** encircle \)-1\(: \)\( N=0,\qquad M_{cl}=0. \)$ Therefore, the closed-loop system is stable.
For $\( k=\frac1{12}, \)\( the Nyquist plot passes through \)-1$, so the closed-loop system is marginally stable.
For $\( \frac1{12}<k<\frac29, \)\( the Nyquist plot has a nonzero net encirclement of \)-1\(: \)\( M_{cl}>0. \)$ Therefore, the closed-loop system is unstable.
For $\( k=\frac29, \)\( the Nyquist plot again passes through \)-1$, so the closed-loop system is marginally stable.
For $\( k>\frac29, \)\( the Nyquist plot does **not** encircle \)-1\(: \)\( N=0,\qquad M_{cl}=0. \)$ Therefore, the closed-loop system is stable.
Robustness margins#
The Nyquist criterion provides a direct way to determine closed-loop stability from the open-loop transfer function \(L(s)\).
It also helps answer more refined questions such as:
How robust is this stability to modeling uncertainty or perturbations?
These questions matter because a system can be stable in principle, yet still be fragile: small changes in gain, phase, or dynamics may drive it unstable.
To quantify this, we introduce robustness margins. We consider four key margins:
Gain margin
How much the loop gain can be increased before the system becomes unstable.Phase margin
How much additional phase lag can be introduced before instability occurs.Time-delay margin
The maximum time delay that can be tolerated before the system becomes unstable.Stability margin
A geometric measure of how close the Nyquist plot comes to the critical point \(-1\).
Gain margin (\(g_m\))#
The gain margin is the smallest factor by which the open-loop gain can be increased before the closed-loop system becomes unstable.
Consider a loop transfer function of the form
with unity feedback.
We ask: How much can \(k\) be increased before instability occurs?
Define the phase crossover frequency \(\omega_{pc}\) as the frequency at which
At \(\omega_{pc}\), the Nyquist plot lies on the negative real axis.
The gain margin is defined as
Phase margin (\(\varphi_m\))#
The phase margin is the amount of additional phase lag required to bring the closed-loop system to the stability limit.
Consider a loop transfer function \(L(s)\) with unity feedback.
We ask: how much extra phase lag can be introduced before instability occurs?
Define the gain crossover frequency \(\omega_{gc}\) as the frequency at which
At \(\omega_{gc}\), the Nyquist plot lies on the unit circle.
The phase margin is defined as
Time-delay margin (\(T_m\))#
The time-delay margin is the maximum time delay that can be introduced before the closed-loop system becomes unstable.
Consider a loop transfer function \(L(s)\) with unity feedback, and suppose a time delay \(T\) is introduced in the loop.
The transfer function of the delay block is
The overall loop transfer function becomes
At frequency \(\omega\), the delay contributes
which corresponds to a pure phase lag of \(-\omega T.\)
At the stability boundary, the Nyquist plot must pass through \(-1\):
Let \(\omega_{gc}\) be the gain crossover frequency, defined by
At this frequency, the Nyquist plot lies on the unit circle. At \(\omega_{gc}\), instability occurs when the additional phase lag due to delay equals the phase margin.
Thus,
Hence, the time-delay margin is
Stability margin (\(s_m\))#
The stability margin is the shortest distance from the Nyquist curve to the critical point \(-1\). It is defined as
Margins from control.stability_margins:
Gain margin gm = 1.2624534993428793
Gain margin (dB) = [2.02430781]
Phase margin pm = 36.73682917236735 deg
Stability margin sm = 0.18720571399555436
Phase crossover freq = 10.343107968625196 rad/s
Gain crossover freq = 0.7436481751781284 rad/s
Stability margin freq = 10.272733778234562 rad/s